## Hardware Nodes Documentation
This page describes the hardware nodes that are present for the 1718 Mars Rover project.
The project contains the following nodes:
- [IRIS](#iris-node)
- [Motor](#motor-node)
- [Tower](#tower-node)
- [Tower Alt](#tower-alt)
- [Pan-Tilt](#pan-tilt)
- [Grasping](#grasp-node)
- Science
- Arm Breakout 1 / 2
### IRIS node
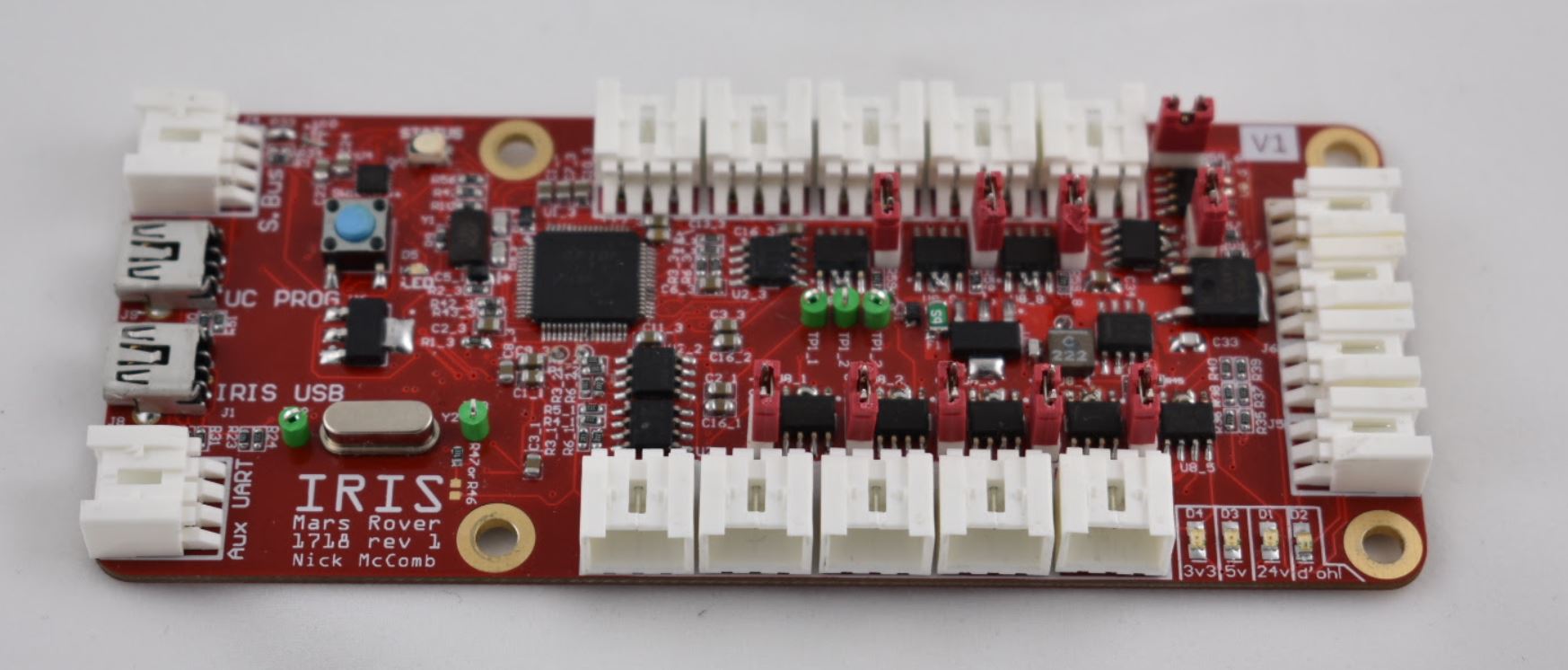 This node serves as the computer's main interface with the hardware in the rest of the Rover. It features 10 RS485 ports and a Teensy Microcontroller that allows it to perform most of the control and sensing features for the Rover.
[Find more documentation here.](iris.md)
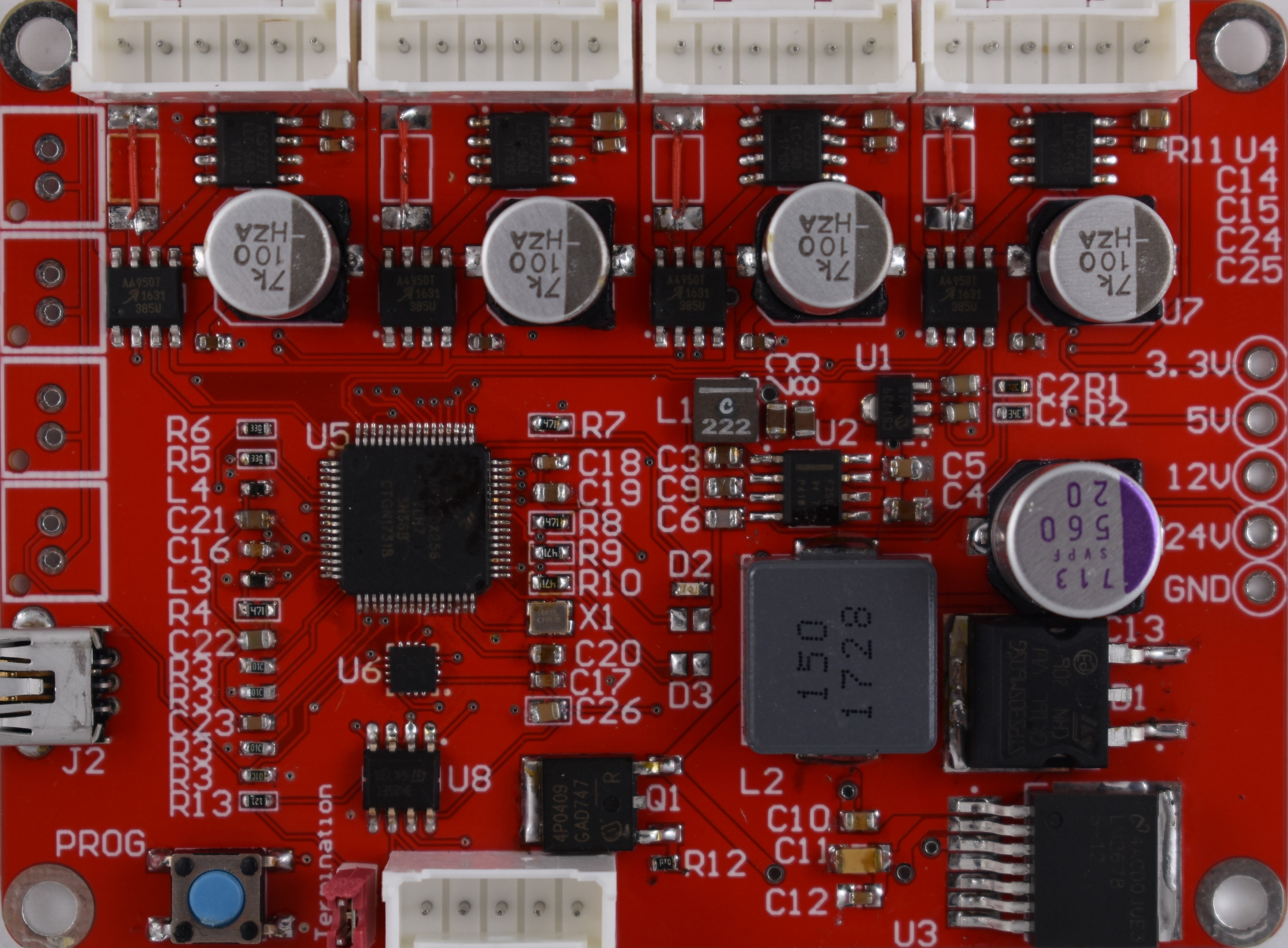
### Motor node
This node serves as the computer's main interface with the hardware in the rest of the Rover. It features 10 RS485 ports and a Teensy Microcontroller that allows it to perform most of the control and sensing features for the Rover.
[Find more documentation here.](iris.md)
### Motor node
 This node controls the motors that turn Rover's wheels.
[Find more documentation here.](motor.md)
### Tower node
This node controls the motors that turn Rover's wheels.
[Find more documentation here.](motor.md)
### Tower node
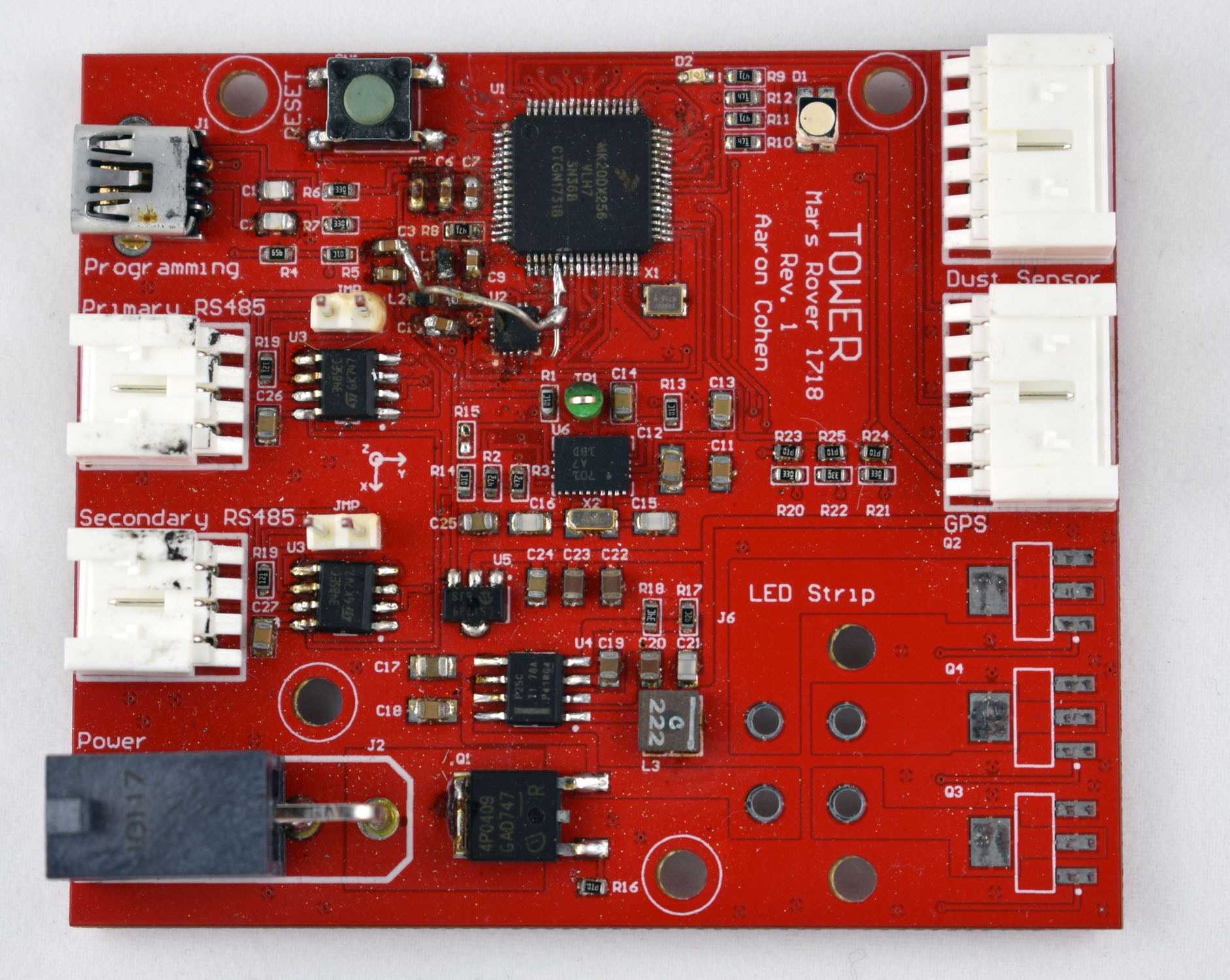 This node is placed outside of the main electronics box on the chassis and collects data from various sensors.
[Find more documentation here.](tower.md)
### Tower alt
This node is placed outside of the main electronics box on the chassis and collects data from various sensors.
[Find more documentation here.](tower.md)
### Tower alt
 This board acts as an alternate for Rover's Tower Node when both of the boards we had didn't work. It really just breaks out a Teensy 3.2 to a few different connectors.
[Find more documentation here.](tower-alt.md)
### Pan-tilt
This board acts as an alternate for Rover's Tower Node when both of the boards we had didn't work. It really just breaks out a Teensy 3.2 to a few different connectors.
[Find more documentation here.](tower-alt.md)
### Pan-tilt
 This board controls servos that allow Rover operators to pan and tilt cameras.
[Find more documentation here.](pan-tilt.md)
### Grasp Node
This board controls servos that allow Rover operators to pan and tilt cameras.
[Find more documentation here.](pan-tilt.md)
### Grasp Node
 Controls 4 DC motors with quadrature encoder and current feedback. Has four analog inputs intended to be used with force resistors.
[Find more documentation here.](grasp.md)
### Science Node
Controls 4 DC motors with quadrature encoder and current feedback. Has four analog inputs intended to be used with force resistors.
[Find more documentation here.](grasp.md)
### Science Node
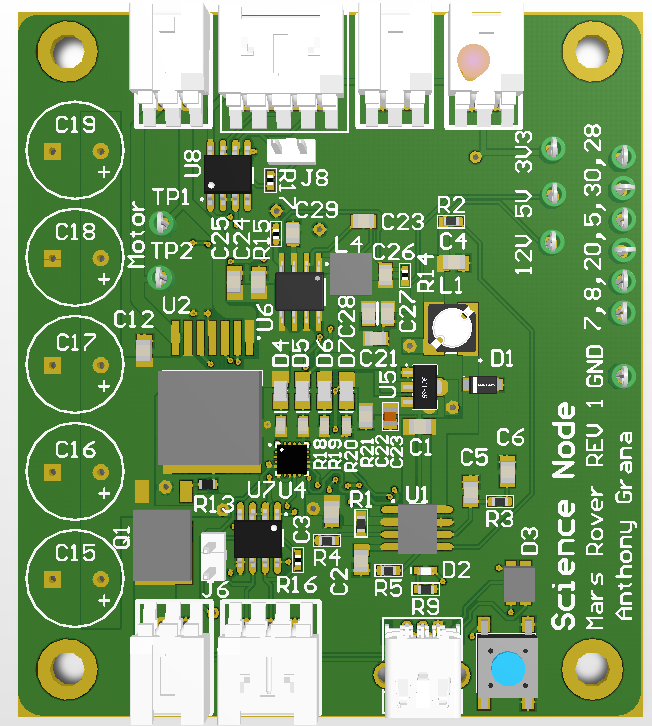 Powers, and comunicates with the Soil Probe via RS-485. Uses simple logic to power a drill motor (24V,5A, full forward, full back, stop). Outputs 5V to power a digital camera. Sends a signal to the didgital camera to control shoot and zoom.
[Find more documentation here.](science.md)
Powers, and comunicates with the Soil Probe via RS-485. Uses simple logic to power a drill motor (24V,5A, full forward, full back, stop). Outputs 5V to power a digital camera. Sends a signal to the didgital camera to control shoot and zoom.
[Find more documentation here.](science.md)