## Hardware Nodes Documentation
This page describes the hardware nodes that are present for the 1718 Mars Rover project.
The project contains the following nodes:
- [IRIS](#iris-node)
- [Motor](#motor-node)
- [Tower](#tower-node)
- Pan-Tilt
- Grasping
- Science
- Arm Breakout 1 / 2
### IRIS node
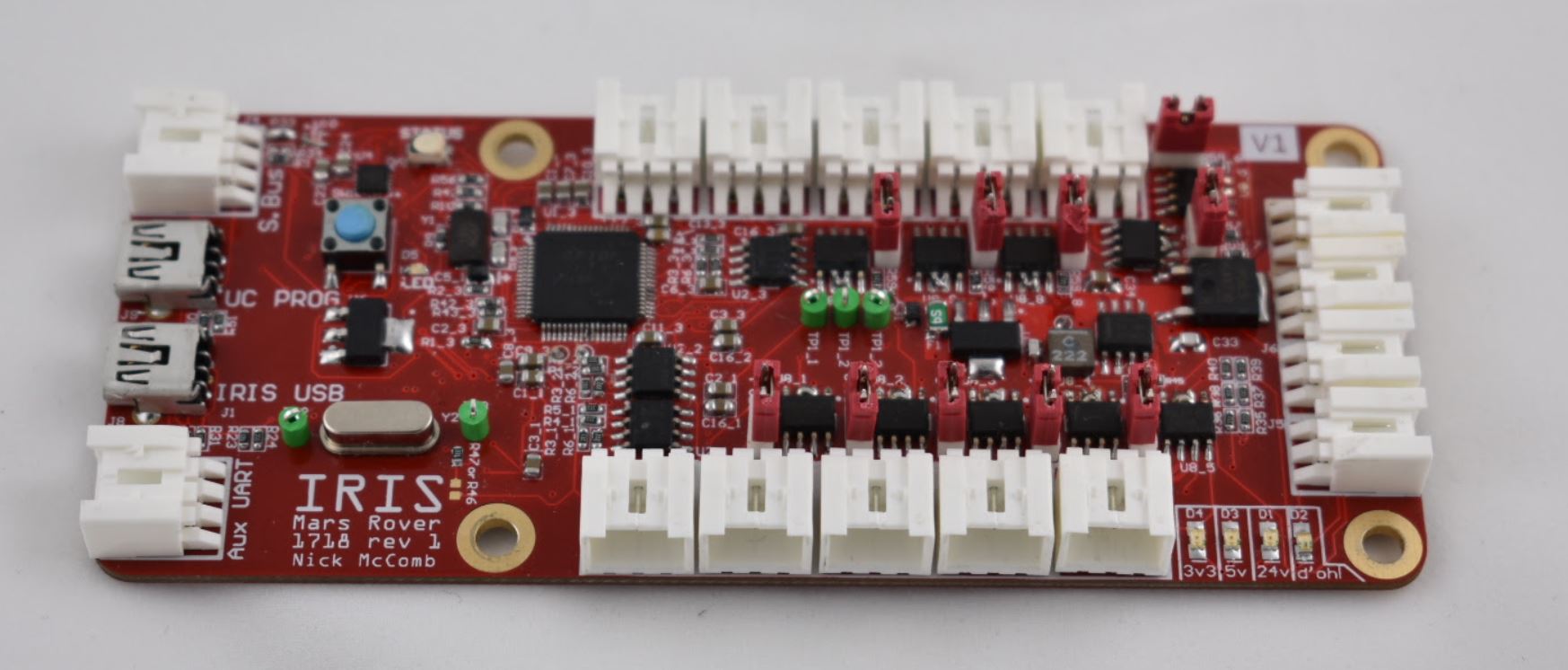 This node serves as the computer's main interface with the hardware in the rest of the Rover. It features 10 RS485 ports and a Teensy Microcontroller that allows it to perform most of the control and sensing features for the Rover.
[Find more documentation here.](iris.md)
### Motor node
This node serves as the computer's main interface with the hardware in the rest of the Rover. It features 10 RS485 ports and a Teensy Microcontroller that allows it to perform most of the control and sensing features for the Rover.
[Find more documentation here.](iris.md)
### Motor node
 This node controls the motors that turn Rover's wheels.
[Find more documentation here.](motor.md)
### Tower node
This node controls the motors that turn Rover's wheels.
[Find more documentation here.](motor.md)
### Tower node
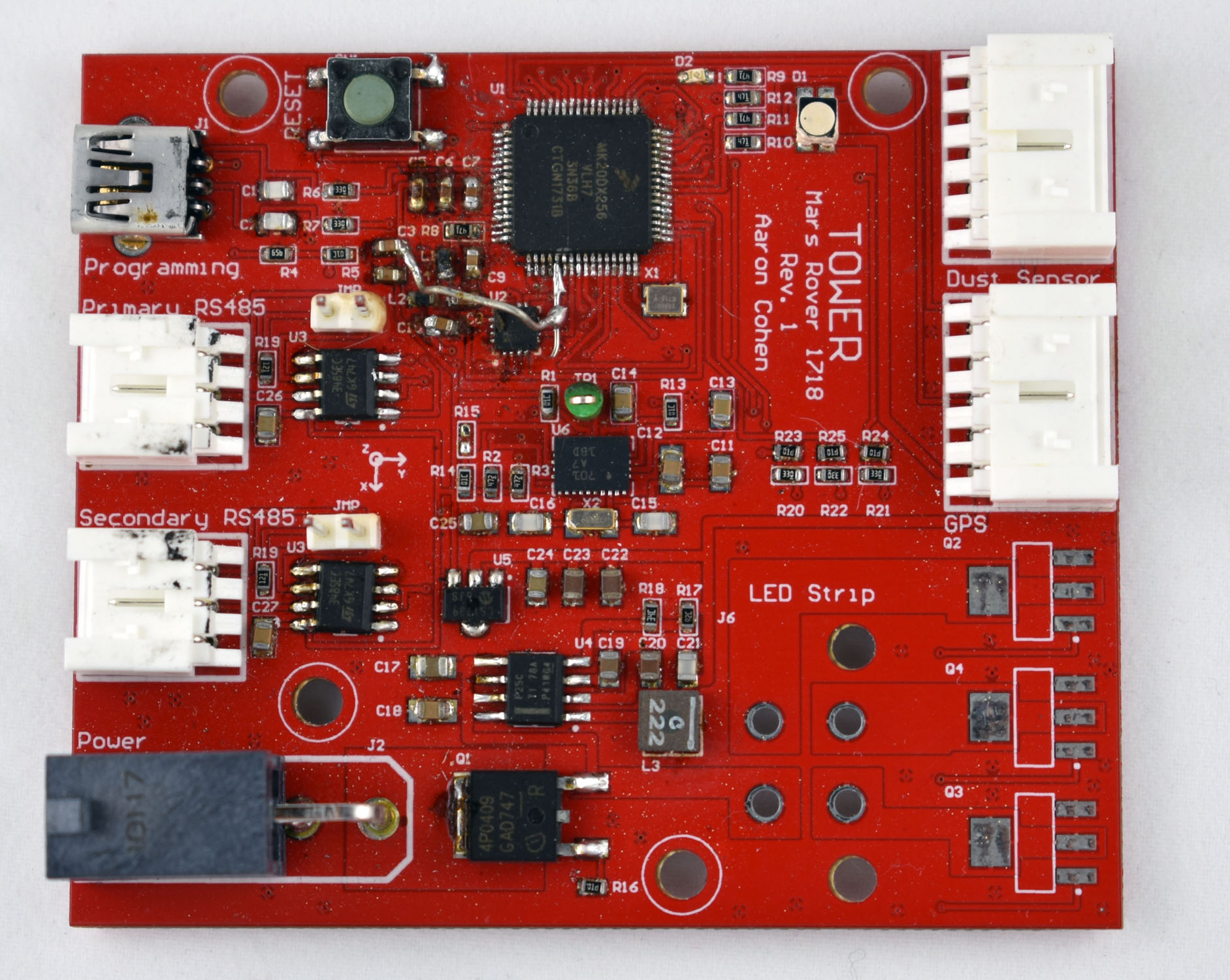 This node is placed outside of the main electronics box on the chassis and collects data from various sensors.
[Find more documentation here.](tower.md)
This node is placed outside of the main electronics box on the chassis and collects data from various sensors.
[Find more documentation here.](tower.md)